





Cet article présente les modifications apportées par Subtop au drone Teledyne Oceanscience Z-Boat 1800 pour intégrer le scanner Velodyne VLP-16 Hi-Res.
A l’origine, ce drone de surface est équipé d’un système de positionnement Trimble BX992 et d’un sondeur monofaisceau Teledyne Odom Echotrac E20. La communication entre ces instruments et l’ordinateur d’acquisition à terre est effectuée au moyen d’une liaison radio. Les instruments et moyens de communication du drone sont alimentés par un boitier branché à des batteries 24 VDC. Ce boitier, nommé PMM (Power Management Module), joue aussi le rôle de hub Ethernet pour communiquer avec le système et permet de redistribuer le courant des batteries.
Il s’agit ici d’ajouter au drone non seulement un scanner mais aussi une centrale d’attitude, indispensable pour obtenir des données exploitables. L’intégration consiste à installer ces nouveaux éléments sur le drone, à les connecter et à les alimenter de manière appropriée pour garantir une bonne synchronisation.
Installation :
Une centrale d’attitude inertielle Navsight Ekinox de chez SBG Systems remplace le récepteur GNSS d’origine. Elle est fixée à l’intérieur du drone et centrée par rapport à la ligne de foi du drone. Elle est orientée vers l’avant du drone comme illustré par la photo ci-après.
Comme le montre la photo de gauche ci-dessous, le scanner est fixé à l’arrière du cadre du Z-Boat. Il n’est ainsi pas masqué par le drone. La photo de droite illustre le connecteur passe-coque qui a été fabriqué pour assurer l’étanchéité de la connexion du scanner. Le boitier du scanner est installé à l’intérieur du drone.

Connexions :
La centrale est alimentée en 24 VDC par une sortie disponible du PMM. Elle est également connectée à ce boitier par Ethernet pour envoyer ses données et reliée au scanner pour le synchroniser.
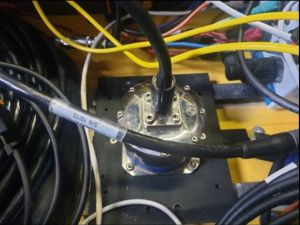
Pour le scanner, un embout de type jack a été ajouté à une batterie du drone pour l’alimenter directement comme illustré par la photo ci-dessous. Le scanner est enfin relié par Ethernet au drone pour envoyer ses données.

Tests :
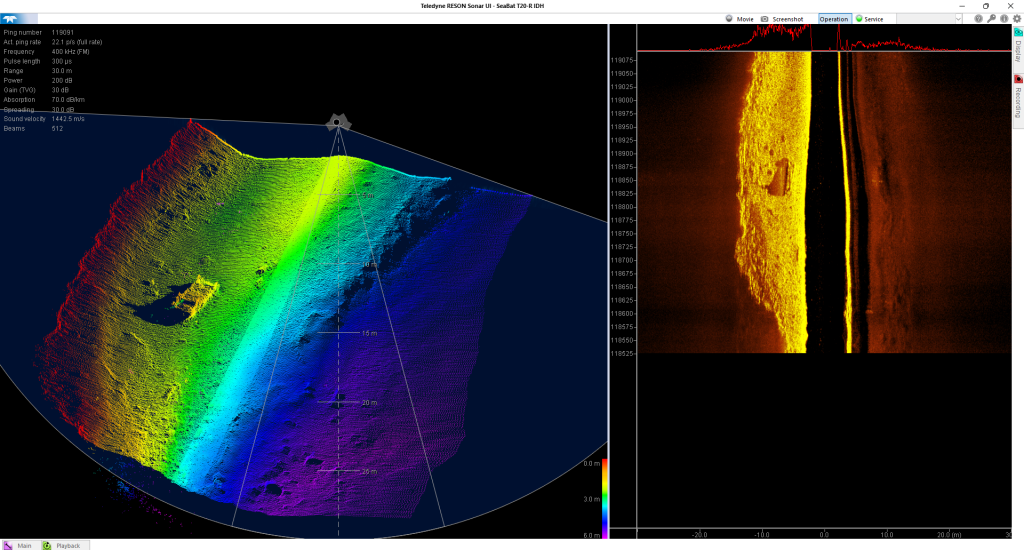
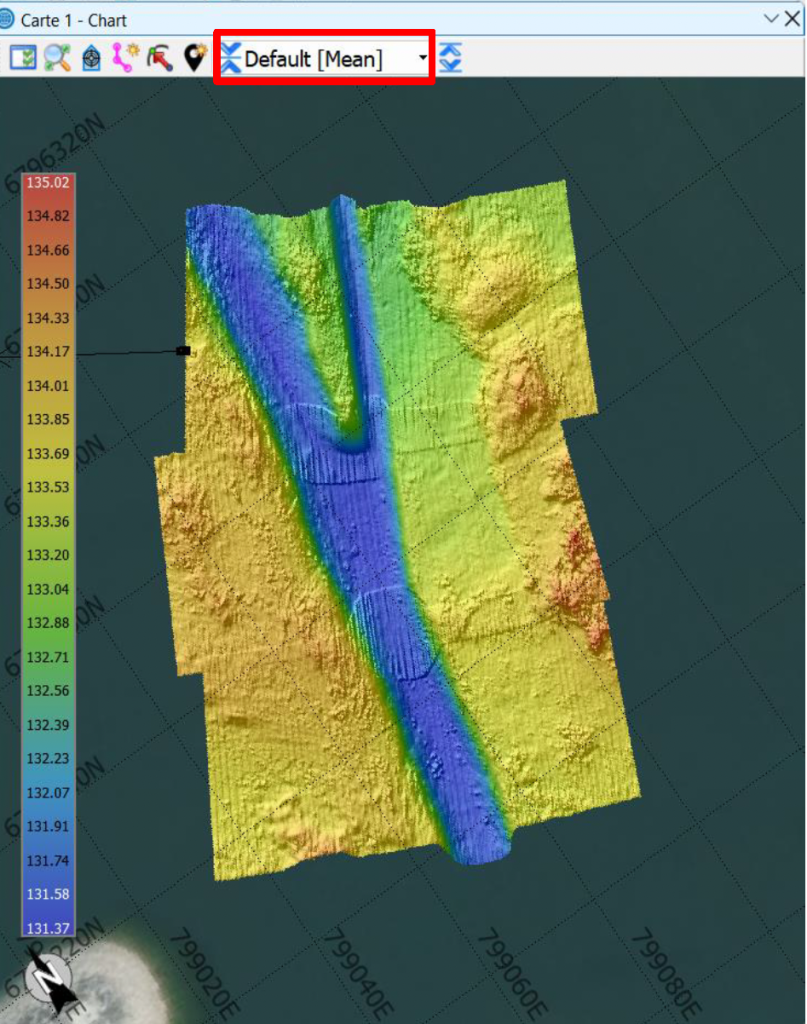
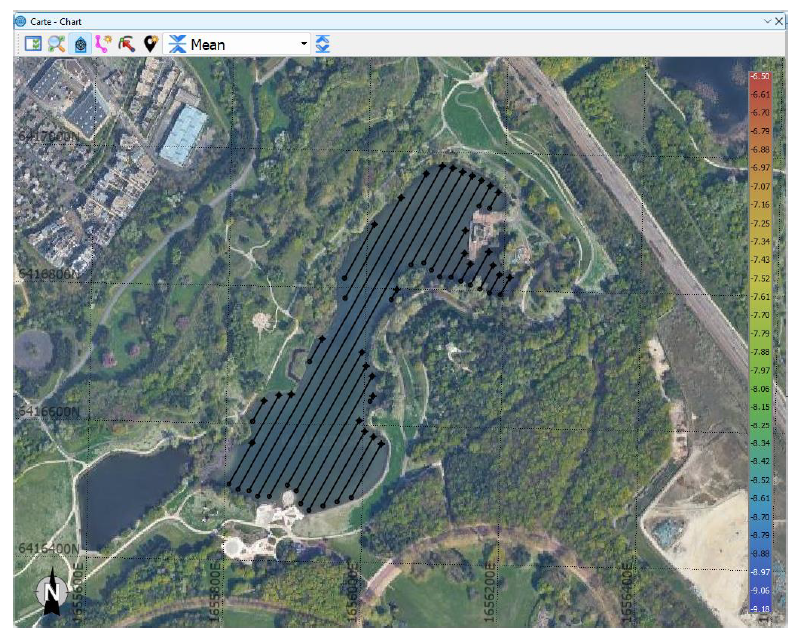
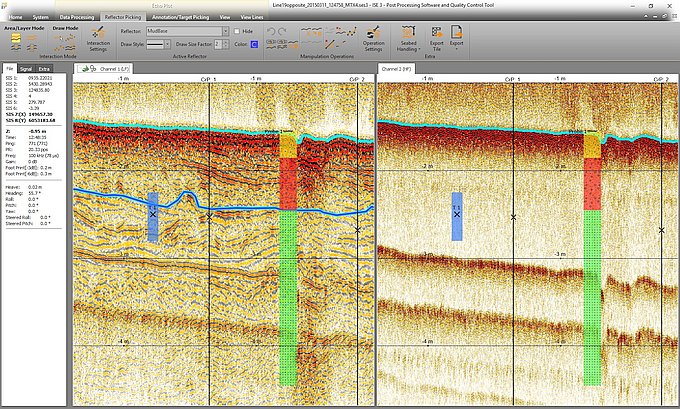
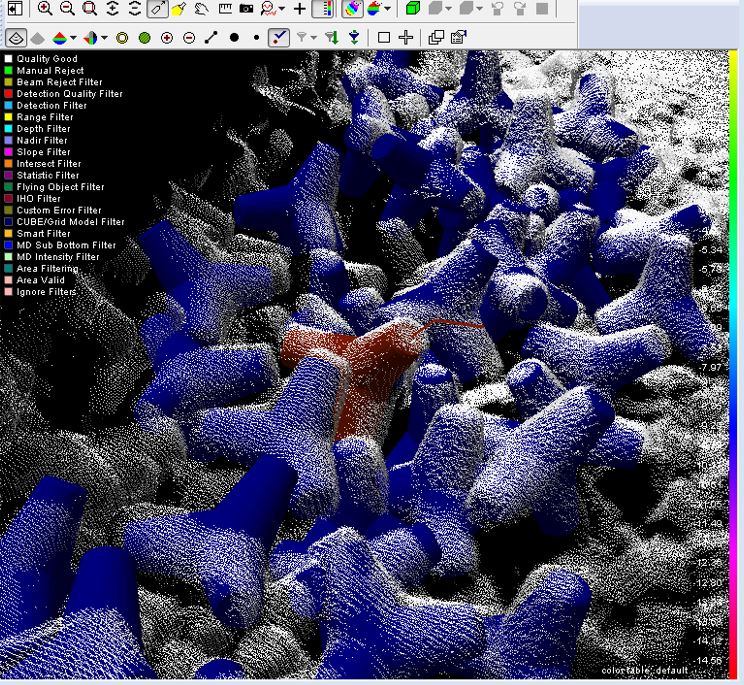
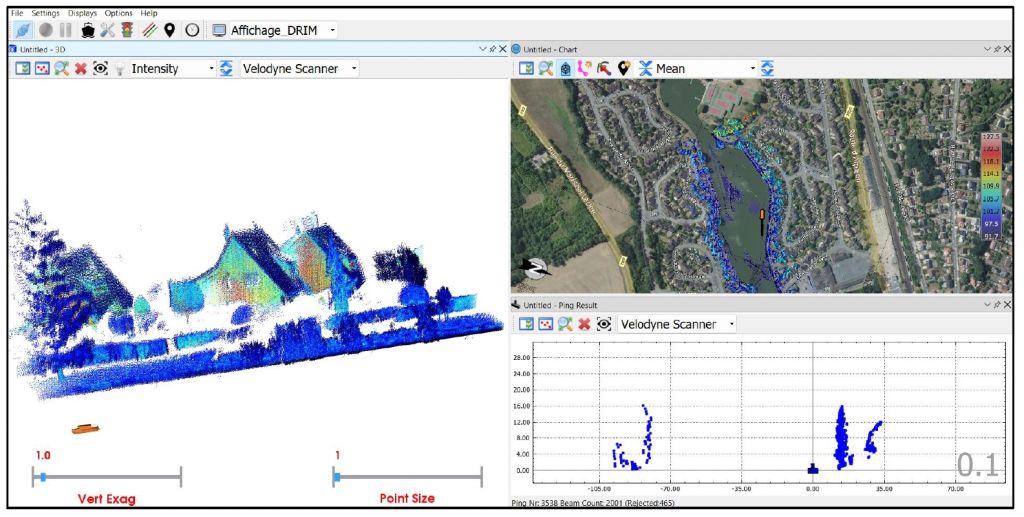
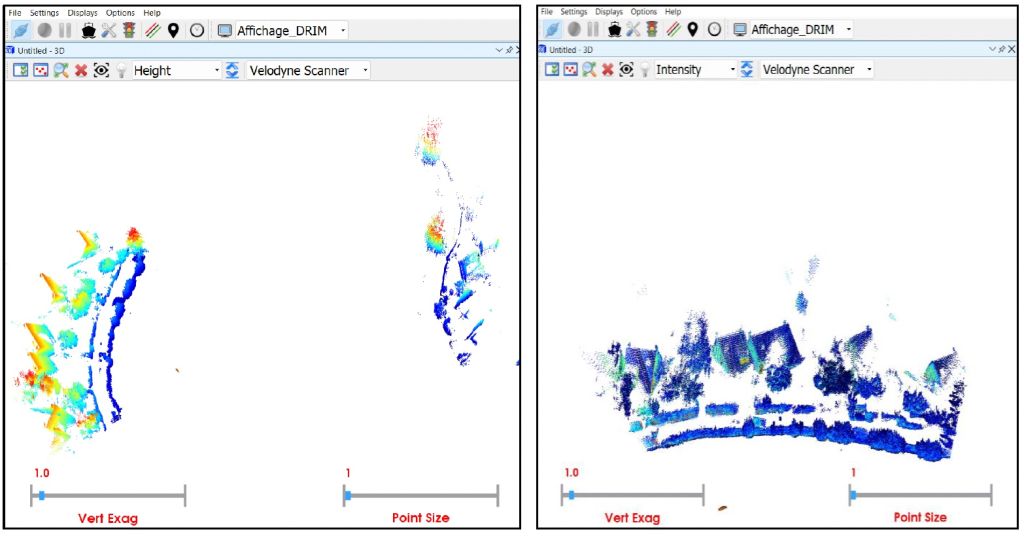
Après avoir vérifié le bon fonctionnement de l’ensemble, des données ont été enregistrées sur le parking des locaux de Subtop en réalisant une calibration Patchtest pour le scanner. Puis, le logiciel AutoPatch de Beamworx a été utilisé pour calculer les résultats. Enfin, un levé avec le logiciel NavAQ a été mené en conditions réelles. Ci-dessous des images du drone sur l’eau et des captures d’écran faites pendant cette acquisition.

La quantité de données envoyées étant beaucoup plus importante que lors de l’utilisation basique de ce Z-Boat, il est important que la communication radio entre le drone et l’ordinateur d’acquisition à terre ne soit pas altérée lors de l’acquisition. Néanmoins, un levé monofaisceau et scanner est parfaitement envisageable avec cette solution.
Des questions ou demande d’informations supplémentaires ?