











Produits d'investigations subaquatiques
Équipements subaquatiques
- Positionnement de surface
- Positionnement sous marin
- Assistance au pilotage
- Échosondeurs et scanner 3D sous-marins
- Géophysique et sismique
- Imagerie sous-marine
- Magnétométrie
- Supports : ROV, USV, AUV, vedettes
- Solutions spécifiques Travaux maritimes et fluviaux
- Instruments océanographiques
- Instruments rivières
- Bouées et flottaison





INNOMAR Standard SBP

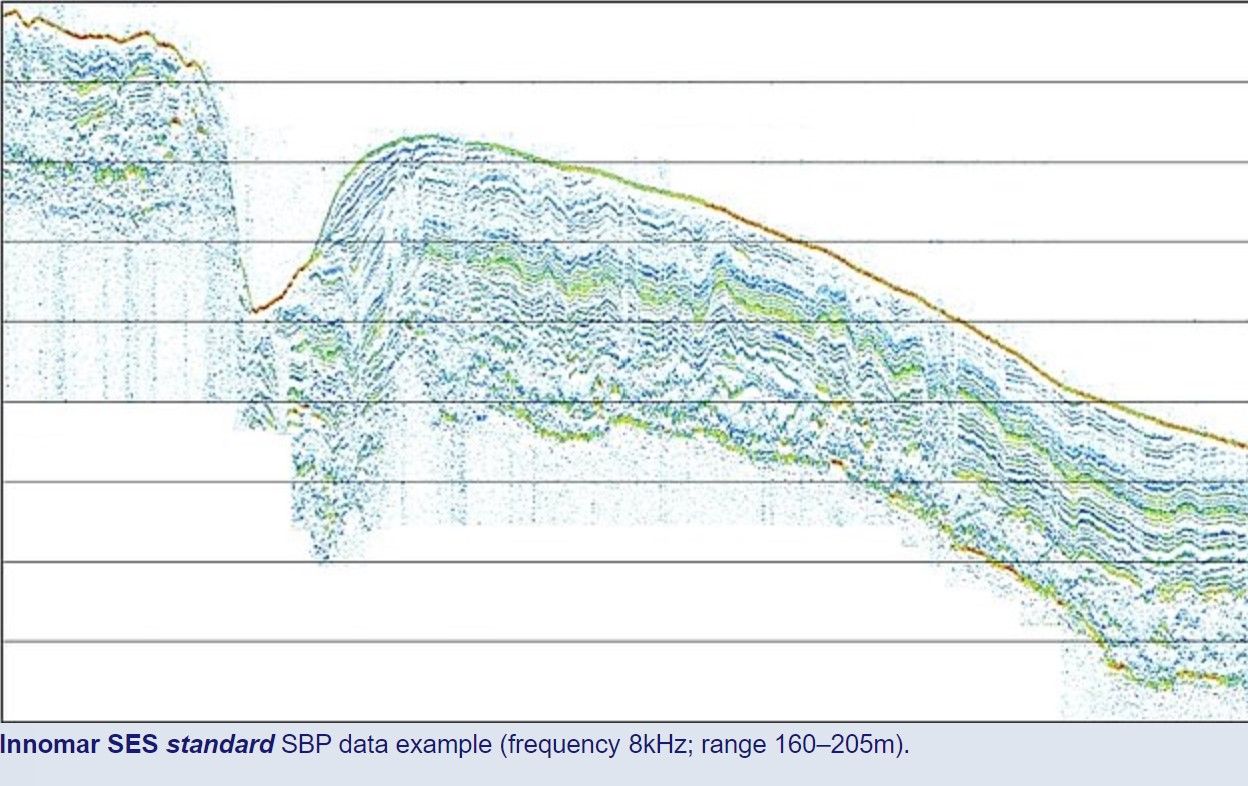
Parmi la gamme de profileurs sous-fonds paramétriques Innomar, le modèle standard Innomar SBP est le plus polyvalent
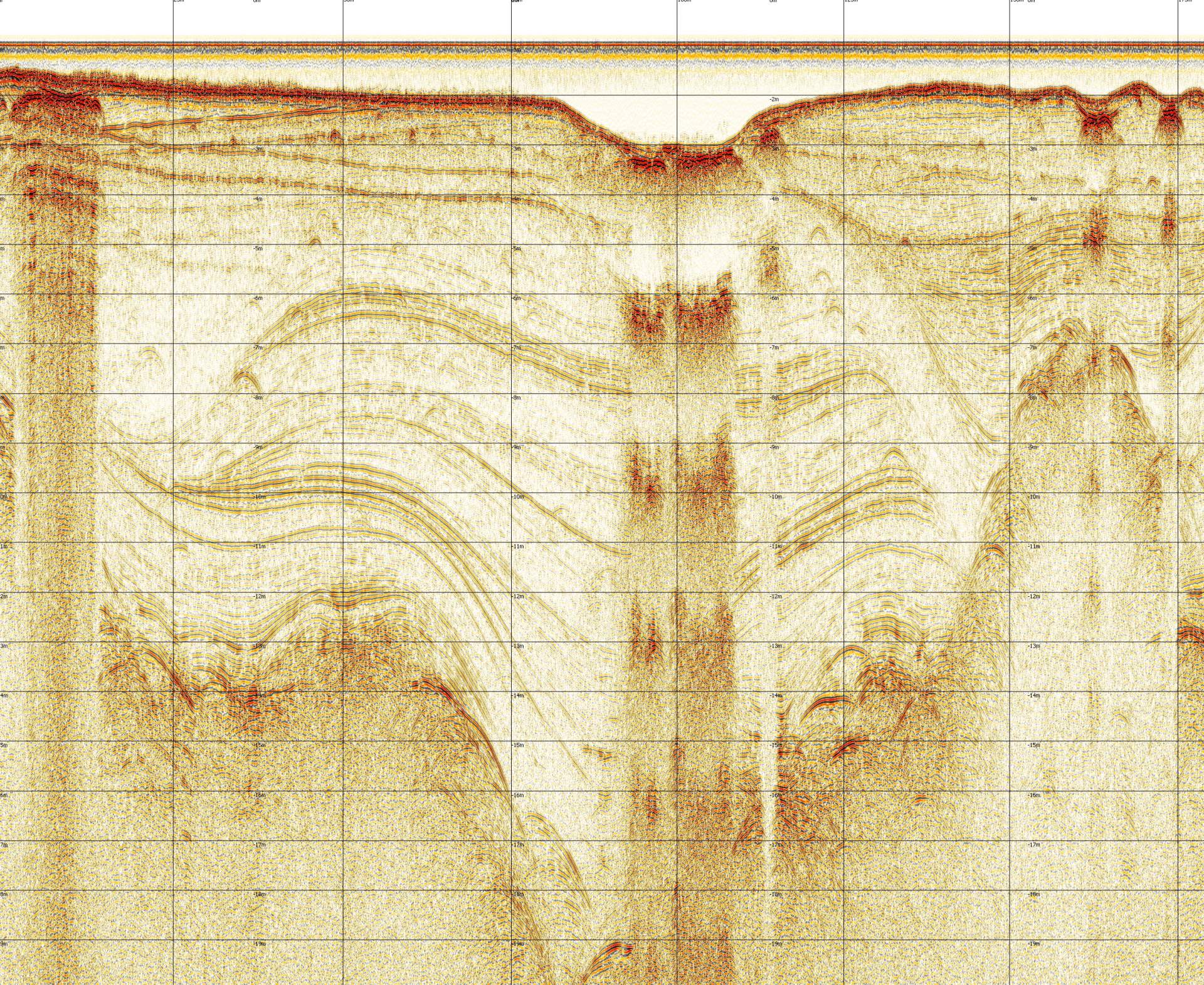
Le taux de ping élevé, le faible encombrement et la possibilité de transmettre des impulsions sonores sur une large gamme de fréquences garantissent des données sous-marines avec une excellente résolution et une très bonne pénétration des sédiments. La stabilisation électronique du faisceau donnera également de bons résultats dans de mauvaises conditions météorologiques.
Un logiciel convivial d’acquisition de données et de contrôle du système (SESWIN) offre la possibilité de commander à distance via un réseau ainsi que de visualiser les données à distance.
Le modèle standard Innomar SES acquiert des données Fullwave Form qui peuvent être traitées avec n’importe quel logiciel sismique (format SEG-Y). Innomar fournit également le logiciel de post-traitement ISE spécialisé sur les données Innomar SBP.
Caractéristiques techniques
Portée : 0.5 – 500 m
Pénétration > à 50 m (Dépend du type de sédiment et du bruit environnemental))
Portée pour chaque couche / Résolution des couches : approx. 1 cm / > à 5 cm
approx. ±2° / footprint 240 dB//µPa re 1m / Puissance acoustique ~3.5 kW
Fréquence secondaire sélectionnable : 4, 5, 6, 8, 10, 12, 15KHz
Largeur d’impulsion sélectionnable 0.07 – 1.5ms
Type d’impulsion : Ricker, CW, LFM chirp
Fréquence d’échantillonage : 60 pings/s
Compensation en pilonnement et roulis par capteur externe
Acquisition des données : digital 16 (24) bit @ ~96 kHz sample rate;
PF 100 kHz envelope echosounder data / bottom track;
SLF full-waveform sub-bottom data
Entrées : GNSS, HRP sensor, trigger
Sorties : trigger, bottom track, analogue SLF
Dimension et poids du transducteur : W 0.34m × D 0.26m × H 0.08m / 30kg dont 15m de cable
Dimension et poids de l’unité d’acquisition : W 0.52m × D 0.40m × H 0.34m / 35 kg
Alimentation électrique 100–240 VAC ou 12/24VDC / <350 W
"Portée Mode HBM : 0.3 – 30 m
Portée Mode SBM : 2 – 1000m"
Fréquence secondaire sélectionnable : 4, 5, 6, 8, 10, 12, 15KHz
Largeur d'impulsion sélectionnable 0.07 – 1ms
Type d'impulsion : Ricker, CW
Compensation en pilonnement par capteur externe
Sorties : trigger, bottom track, analogue LF

